

Johdatus tekoälyn agentteihin
Nykyään tekoälyn edustajat ovat uusi sähkö. Se mullistaa tekniikkaa. Keinotekoinen älykkyys tekee koneista / tietokoneista älykkäitä kuin ihmiset.
Mikä on agentti?
Agentti on mitä tahansa, joka ryhtyy toimiin sen tiedon perusteella, jonka se saa ympäristöstä. Ihmisellä tekijällä on aistielimiä, jotka tunnistavat ympäristön ja ruumiinosat toimimaan, kun taas robottiagentilla on anturit ympäristön havaitsemiseksi.
Kuinka agentti on vuorovaikutuksessa ympäristön kanssa?
Aineet ovat vuorovaikutuksessa ympäristön kanssa kahdella tavalla:
1. Havainto
Havainto on passiivinen vuorovaikutus, jossa tekijä saa tietoa ympäristöstä muuttamatta ympäristöä. Robotin anturit auttavat sitä saamaan tietoa ympäristöstä vaikuttamatta ympäristöön. Siksi tiedon hankkimista antureiden kautta kutsutaan havaintoksi.
2. Toimi
Toiminta on aktiivista vuorovaikutusta, jossa ympäristö muuttuu. Kun robotti siirtää estettä käsivarrensa avulla, sitä kutsutaan toiminnaksi, kun ympäristö muuttuu. Robotin vartta kutsutaan efektoriksi, koska se suorittaa toiminnon.
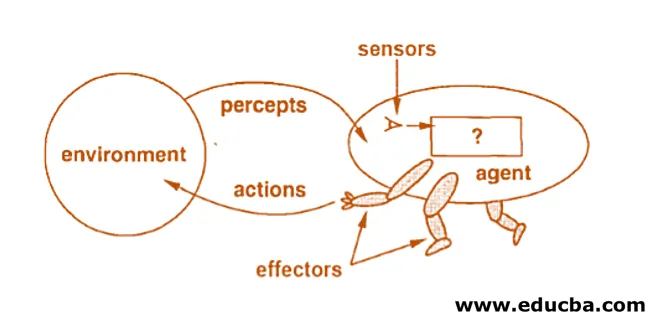
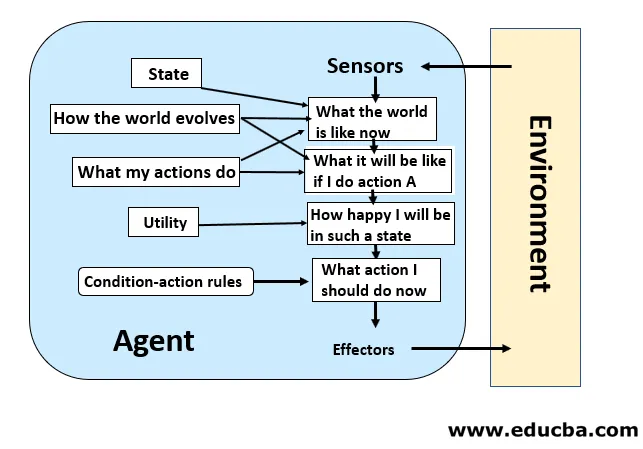
Yllä olevan kuvan selitys:
- Agentin ja ympäristön vuorovaikutus tapahtuu anturien ja tehostajien kautta.
- Mieti esimerkiksi chatbotti, joka on virtuaaliassistentti. Kun se lukee ja ymmärtää käyttäjän viestien merkityksen, sitä kutsutaan havaintoksi. Ja kun se vastaa käyttäjälle käyttäjän viestin analysoinnin jälkeen, sitä kutsutaan toiminnaksi.
Kuinka agenttien tulisi toimia tekoälyssä?
Alla on kohtia, jotka selittävät asiamiehen toiminnan:
- Järkevä edustaja tekee oikein. Oikea toiminta on se, joka aiheuttaa agentin menestyneimmin.
- Kaikkitietävä agentti tietää, mitä vaikutuksia toiminnalla on, ja osaa toimia vastaavasti, mutta todellisuudessa se ei ole mahdollista.
- Suorituskyvyn mittaajan määrittelemä menestysaste
- Havaintosekvenssi, joka on agentin koko käsitysjakso nykyiseen hetkeen asti
- Agentin tuntemus ympäristöstä
- Mitä toimia agentti voi suorittaa?
2. Havaitsevien sekvenssien kartoitus toimintoihin
Kun tiedetään, että aineen toiminta riippuu täysin havaintohistoriasta - havaintojaksosta, agentti voidaan kuvata käyttämällä kartoitusta. Kartoitus on luettelo, joka kuvaa havaintojakson toimintoon. Kun määrittelemme minkä toimenpiteen agentin tulisi suorittaa annettua havaintojaksoa vastaavasti, määrittelemme ideaalisen agentin mallin.
3. Autonomia
Agentin käyttäytyminen riippuu hänen omasta kokemuksestaan sekä edustajan sisäisestä tiedosta, jonka edustaja on suunnitellut. Järjestelmä on itsenäinen, jos se ryhtyy toimiin kokemuksensa mukaan. Joten alkuvaiheessa, koska sillä ei ole kokemusta, on hyvä tarjota sisäänrakennettu tieto. Agentti oppii sitten evoluution kautta. Todella itsenäisen älykkään agentin, jos sille annetaan riittävästi aikaa sopeutua, pitäisi voida toimia menestyksekkäästi monissa ympäristöissä.
Tekijöiden tyypit tekoälyssä
Seuraavassa on 4 agenttityyppiä:
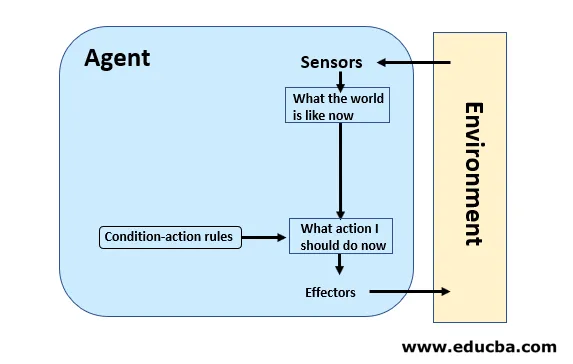
1. Reflex Agent
Reflex Agent toimii samalla tavalla kuin kehomme refleksivaikutus (esim. Kun nostamme sormeamme heti, kun se koskettaa liekin kärkeä). Aivan kuten kehomme nopea reagointi nykyiseen tilanteeseen, myös agentti reagoi nykyiseen ympäristöön riippumatta ympäristön aikaisemmasta tilasta. Heijastin voi toimia kunnolla vain, jos tehdyt päätökset perustuvat nykyiseen käsitykseen.
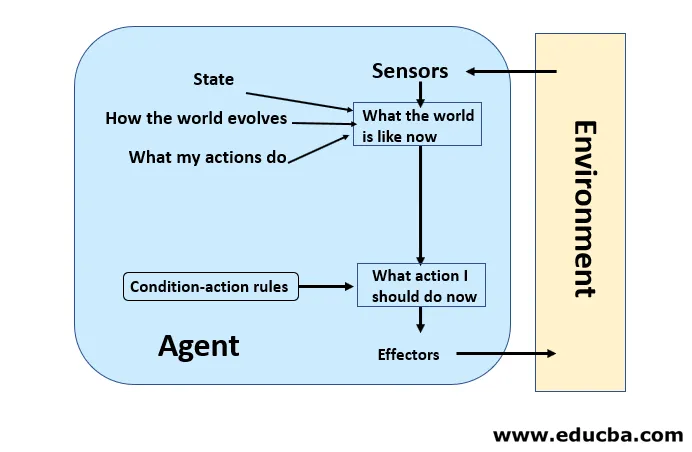
2. Agentit, jotka seuraavat maailmaa
Nämä ovat agentteja, joilla on muisti. Se tallentaa tiedot edellisestä tilasta, nykyisestä tilasta ja suorittaa toimenpiteen vastaavasti. Aivan kuten ajon aikana, jos kuljettaja haluaa vaihtaa kaistaa, hän katselee peiliin tietääkseen takana olevien ajoneuvojen nykyisen sijainnin. Edestä katsottuna hän näkee vain edessä olevat ajoneuvot ja koska hänellä on jo tietoja ajoneuvojen sijainnista takanaan (peilistä hetki sitten), hän voi turvallisesti vaihtaa kaistaa. Edellinen ja nykyinen tila päivitetään nopeasti toiminnan päättämiseksi.
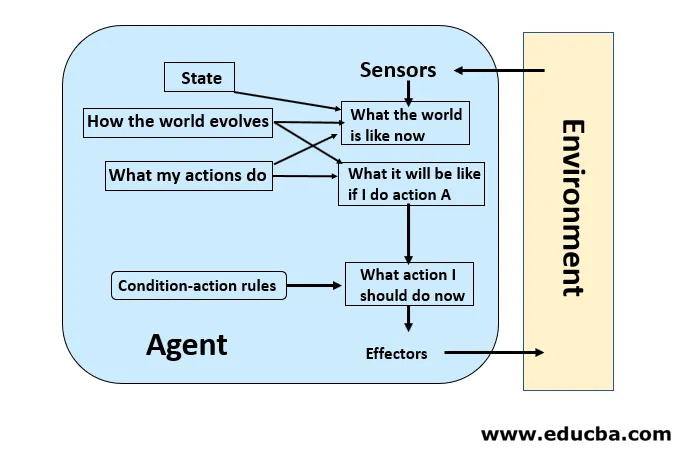
3. Tavoitepohjaiset agentit
Joissakin tilanteissa pelkästään nykytilan tiedot eivät ehkä auta oikean päätöksen tekemisessä. Jos tavoite tunnetaan, agentti ottaa oikean päätöksen tekemiseksi huomioon tavoitteen tiedot nykyisen tilatiedon lisäksi. Esimerkiksi, jos edustaja on itse ajava auto ja tavoitteena on määränpää, niin reitin tiedot määränpäähän autolla autoja päättäessä, milloin kääntyä vasemmalle tai oikealle.
'Haku' ja 'suunnittelu' ovat AI: n kaksi alakenttää, jotka auttavat agenttia saavuttamaan tavoitteensa. Tavoitepohjainen agentti saattaa vaikuttaa vähemmän tehokkaalta, mutta on kuitenkin joustava. Kun otetaan huomioon sama yllä mainittu esimerkki, jos kohde muuttuu, agentti manipuloi toimiaan vastaavasti. Näin ei ole refleksi-agentin tapauksessa, koska kaikki säännöt on kirjoitettava uudelleen tavoitteen muutoksen yhteydessä.
4. Hyötyagentit
Tavoitteen saavuttamiseksi voi olla monia mahdollisia sekvenssejä, mutta jotkut ovat parempia kuin toiset. Kun otetaan huomioon sama edellä mainittu esimerkki, kohde tunnetaan, mutta reittejä on useita. Sopivan reitin valitseminen vaikuttaa myös edustajan yleiseen menestykseen. Reitin valinnassa on monia tekijöitä, kuten lyhin, mukavin jne. Menestys riippuu agentin hyödyllisyydestä käyttäjän mieltymysten perusteella.
Apuohjelma on toiminto, joka kuvaa tilan todelliseksi lukuksi, joka kuvaa onnellisuuden astetta. Apuohjelmatoiminto määrittelee sopivan vaihtoehdon, jos tavoitteet ovat ristiriidassa.
Johtopäätös - tekijöiden tekoäly
Agentti on mitä tahansa, joka ryhtyy toimiin sen tiedon perusteella, jonka se saa ympäristöstä. Agentit ovat vuorovaikutuksessa ympäristön kanssa kahdella tavalla: havaitseminen ja toiminta. Agentit voivat olla rationaalisia tai kaikkitietäviä.
Seuraavassa on 4 agenttityyppiä:
- Reflex (reaktiivinen) aine - agentti ilman
- Agentit, jotka seuraavat maailmaa
- Tavoitepohjaiset agentit
- Apuohjelmat
Suositellut artikkelit
Tämä on opas tekoälyn agentteihin. Tässä keskustellaan siitä, mikä on agentti, miten aine on vuorovaikutuksessa ympäristön kanssa, ja neljästä agenttityypistä. Voit myös käydä läpi muiden aiheeseen liittyvien artikkeleidemme saadaksesi lisätietoja -
- Keinotekoinen älykkyystekniikka
- Kuinka tekoäly toimii?
- Koneoppimisen sovellukset
- Koneoppimisen algoritmien tyypit
- Keinotekoinen älykkyystekniikat
- 12 suosituinta anturityyppiä ja niiden sovelluksia