

Johdanto autoenkoodereihin
Kyse on keinotekoisesta hermostoverkosta, jota käytetään tehokkaan tiedon koodaamiseen valvomattomalla tavalla. Autoencoderin päämäärää käytetään oppimaan tietoryhmän esitys erityisesti mittasuhteiden vähentämiseksi. Autoenkoodereilla on ainutlaatuinen ominaisuus, jossa sen syöttö on yhtä suuri kuin sen lähtö muodostamalla feedforwarding-verkkoja. Autoencoder muuttaa sisääntulon pakattuksi dataksi pienimittaisen koodin muodostamiseksi ja palauttaa sitten tulon uudelleen halutun tuloksen muodostamiseksi. Tulon pakattua koodia kutsutaan myös piileväksi tilaesitykseksi. Yksinkertaisesti sanottuna päätavoitteena on vähentää vääristymiä piireiden välillä.
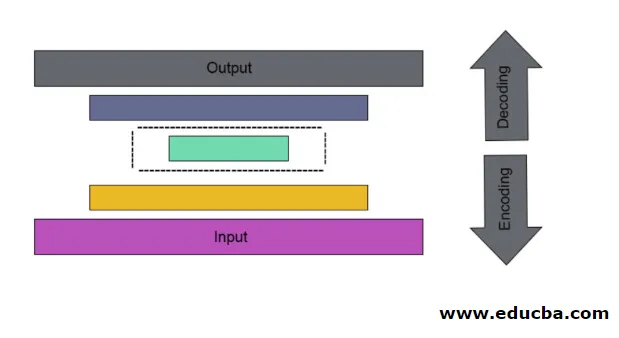
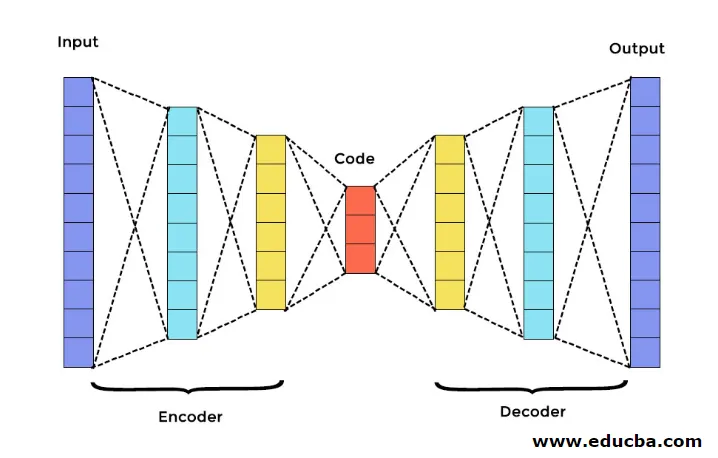
Autoencoderissa on kolme pääkomponenttia. Ne ovat enkooderi, dekooderi ja koodi. Kooderi ja dekooderi on kytketty kokonaan syöttövälitysverkon muodostamiseksi. Koodi toimii yhtenä kerroksena, joka toimii omaa ulottuvuutta kohti. Autoencoderin kehittämiseksi sinun on asetettava hyperparametri, eli sinun on asetettava ydinkerroksen solmujen lukumäärä. Yksityiskohtaisemmin dekooderin lähtöverkko on tulokooderin peilikuva. Dekooderi tuottaa halutun lähdön vain koodikerroksen avulla.
Varmista, että kooderilla ja dekooderilla on samat mitta-arvot. Tärkeä parametri autoenkooderin asettamiseksi on koodikoko, kerrosten lukumäärä ja solmujen lukumäärä kussakin kerroksessa.
Koodikoko määritetään keskikerroksessa olevien solmujen kokonaismäärällä. Keskimääräisen kerroksen pieni koko on suositeltava tehokkaan puristuksen aikaansaamiseksi. Kerrosten lukumäärä autoenkooderissa voi olla syvä tai matala haluamallasi tavalla. Autoenkooderissa olevien solmujen lukumäärän tulisi olla sama sekä enkooderissa että dekooderissa. Dekooderin ja kooderin kerroksen on oltava symmetrinen.
Pinotussa autoenkooderissa sinulla on yksi näkymätön kerros sekä kooderissa että dekooderissa. Se koostuu käsin kirjoitetuista kuvista, joiden koko on 28 * 28. Nyt voit kehittää autoenkooderin, jossa 128 solmua näkymättömässä kerroksessa on 32 koodikoodina. Käytä tätä toimintoa lisätäksesi useita lukuja kerroksia
model.add(Dense(16, activation='relu'))
model.add(Dense(8, activation='relu'))
muuntamista varten,
layer_1 = Dense(16, activation='relu')(input)
layer_2 = Dense(8, activation='relu')(layer_1)
Nyt tämän kerroksen lähtö lisätään tuloksi seuraavaan kerrokseen. tämä on kutsuttava kerros tässä tiheässä menetelmässä. Dekooderi suorittaa tämän toiminnon. Se käyttää sigmoid-menetelmää tulosteen saamiseksi välillä 0 - 1. Koska tulo on välillä 0 - 1
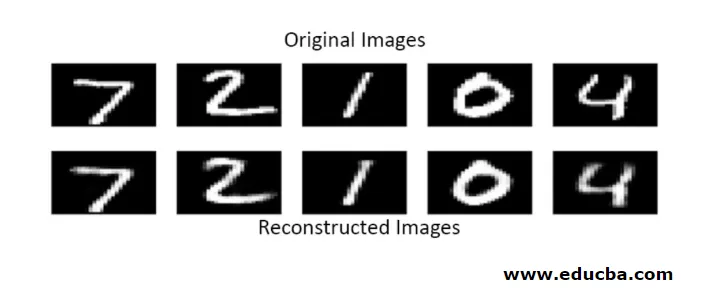
Autoencoderin syötteen rekonstruointi tässä menetelmässä tapahtuu ennustamalla. Yksittäinen kuvatesti suoritetaan, ja lähtö ei ole täsmälleen sama kuin sisääntulo, mutta samanlainen kuin tulo. Näiden vaikeuksien poistamiseksi voit tehdä automaattikooderista tehokkaamman lisäämällä useita tasoja ja lisäämällä useita solmuja tasoille. Mutta tehdessään sen tuloksena on kopio tulosta vastaavasta tiedosta. Mutta tämä ei ole odotettu tulos.
Autoencoderin arkkitehtuuri
Tässä pinotussa arkkitehtuurissa koodikerroksella on pieni mitta-arvo kuin sisääntulotiedot, jossa sen sanotaan olevan täydellisessä autoenkooderissa.
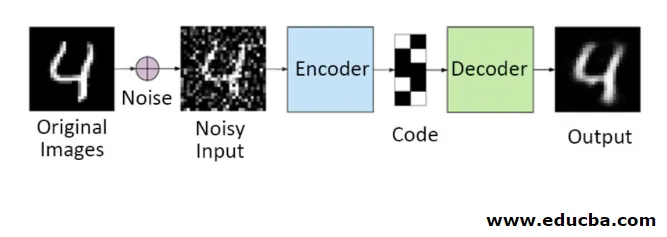
1. Denoising autoencoderit
Tässä menetelmässä et voi kopioida tulosignaalia lähtösignaaliin saadaksesi täydellisen tuloksen. Koska täällä tulosignaali sisältää kohinaa, joka on vähennettävä, ennen kuin saadaan tulos, joka on taustalla tarvittava data. Tätä prosessia kutsutaan denoisevaksi autoenkooderiksi. Ensimmäinen rivi sisältää alkuperäisiä kuvia. Joten niistä tehdään meluisa tulosignaali, meluista dataa lisätään. Nyt voit suunnitella autoenkooderin saadaksesi melutonta lähtöä seuraavasti
autoencoder.fit(x_train, x_train)
Muokattu Autoencoder on seuraava,
autoencoder.fit(x_train_noisy, x_train)
Siksi voit saada melutonta lähtöä helposti.
Convolution-automaattikooderia käytetään monimutkaisten signaalien käsittelemiseen ja saadaan myös parempi tulos kuin normaalissa prosessissa
2. Harvat autoenkooderit
Autokoodereiden tehokkaaseen käyttöön voit suorittaa kaksi vaihetta.
Aseta pieni koodikoko, ja toinen aiheuttaa automaattisen kooderin häiriöitä.
Sitten toinen tehokas menetelmä on laillistaminen. Tämän vakioinnin käyttäminen edellyttää, että säädät harvoisuusrajoitukset. Aktivoidaksesi joitain kerroksen solmujen osia lisää joitain lisätermejä häviöfunktioon, joka työntää autoenkooderia tekemään jokaisen tulon yhdistetyinä pieninä solmuina ja se saa kooderin löytämään joitain ainutlaatuisia rakenteita annetusta tiedosta. Sitä voidaan käyttää myös suurelle määrälle dataa, koska vain osa solmuista on aktivoitu.
Sparsity-rajoitusarvo on lähempänä nollaa
Koodikerroksen luomiseksi
code = Dense(code_size, activation='relu')(input_img)
Jos haluat lisätä normaaliarvon,
code = Dense(code_size, activation='relu', activity_regularizer=l1(10e-6))(input_img)
Tässä mallissa vain 0, 01 on lopullinen tappio, joka johtuu myös laillistamisajasta.
Tässä harvassa mallissa joukko koodiarvoja on totta odotetulle tulokselle. Mutta sillä on melko alhaiset varianssiarvot.
Säännöllisillä autokoodereilla on ainutlaatuiset ominaisuudet, kuten tukevuus puuttuviin tuloihin, harva esitys ja lähinnä johdannaisten arvo esityksissä. Jotta voit käyttää tehokkaasti, pidä pienin koodikoko ja matala kooderi ja dekooderi. He löytävät suuren tulokapasiteetin, eikä he tarvitse mitään ylimääräistä säännöllistä termiä, jotta koodaus olisi tehokas. Ne on koulutettu antamaan maksimaalinen vaikutus kuin kopioimaan ja liittämään.
3. Vaihteleva autoenkooderi
Sitä käytetään monimutkaisissa tapauksissa ja se löytää jakelumahdollisuudet suunnitellessaan syöttötietoja. Tämä variaatioautoenkooderi käyttää näytteenottomenetelmää tehokkaan tuloksen saamiseksi. Se noudattaa samaa arkkitehtuuria kuin normalisoidut autoenkooderit
johtopäätös
Siksi autoenkoodereita käytetään oppimaan reaalimaailman tiedot ja kuvat, jotka ovat mukana binaarisessa ja moniluokkaisessa luokittelussa. Sen yksinkertainen prosessi ulottuvuuden vähentämiseksi. Sitä käytetään rajoitetussa Boltzmann-koneessa ja sillä on tärkeä rooli siinä. Sitä käytetään myös biokemiallisessa teollisuudessa oppimisen paljastamattoman osan löytämiseen ja käytetään älykkään käyttäytymisen mallin tunnistamiseen. Jokaisella koneoppimisen komponentilla on itse organisoitu luonne, Autoencoder on yksi niistä, joka on onnistunut tekoälyn oppimisessa
Suositellut artikkelit
Tämä on opas automaattikoodereihin. Tässä keskustellaan Autoencoderin pääkomponenteista, jotka ovat enkooderi, dekooderi ja koodi sekä Autoencoderin arkkitehtuuri. Saatat myös katsoa seuraavia artikkeleita saadaksesi lisätietoja -
- Big Data -arkkitehtuuri
- Koodaus vs. dekoodaus
- Koneoppimisarkkitehtuuri
- Big Data Technologies